

整体控制在不饱和聚酯树脂热压成型液压机电液伺服系统中的应用
要了解积分控制的功能和需要,您必须了解比例电液定位伺服机构的缺点和局限性。简化的组合剖面图和框图如图1所示。
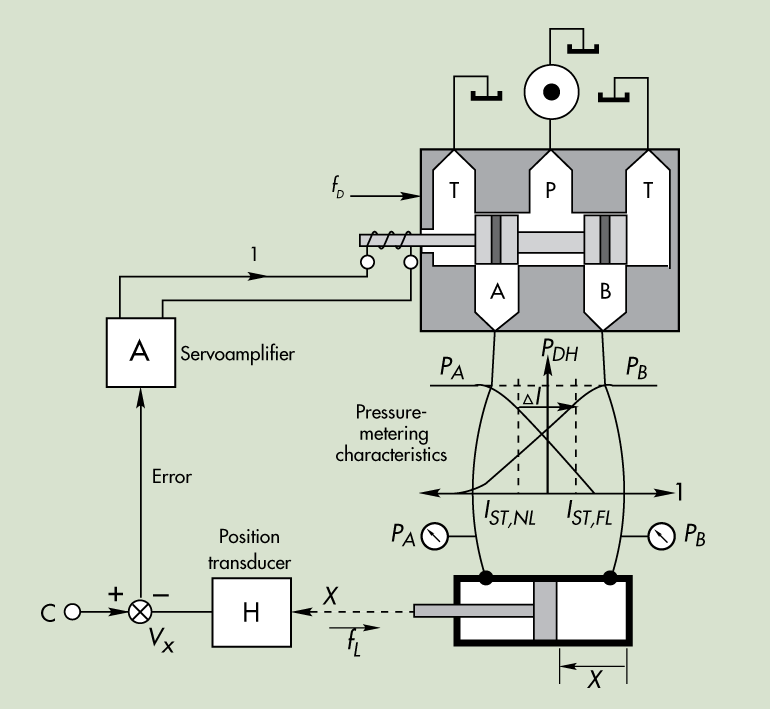
这个简化的剖视图/方框图显示了阀门中的压力计量与阀门内的干扰如何结合以产生气缸定位误差
认为没有负载在气缸(ƒ施加大号 = 0)。如果要停止气缸,其气缸端压力必须超过气缸盖压力适量气缸面积比。此外,不饱和聚酯树脂热压成型液压机阀门的电磁线圈必须有足够的电流来维持阀门的保持压力。保持电流在图1中标识为I ST,NL-在空载条件下的失速电流。
现在让我们施加一个外部负载,这将导致顶端压力上升。阀的计量特性要求杆端压力下降。在新的均衡条件被确定为我ST,FL,代表全负荷状态下失速电流。显然,这需要由Δ表示的量在线圈电流的变化我。
电流闭合时产生电流,并且假设命令信号C没有发生变化,新电流只能由位置传感器输出V X的变化产生。请注意,传感器的输出仅在气缸位置改变时才会改变。然后我们得出结论,位置伺服机构 - 在这种比例控制下 - 不能完美地补偿负载变化并且固有地产生负载引起的定位误差。
作用在阀芯上的扰动力F D产生类似的结果。通过简单的分析过程,可以将所有干扰分解为作用于阀门输入的干扰电流。此外,一旦设计了环路并且已经建立了增益,就可以将干扰分解为输出定位误差。这里不再重述细节,但图2以示意图形式总结了它们。
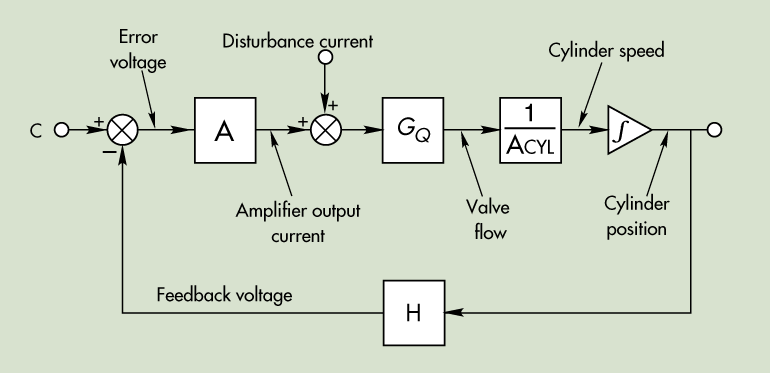
2.该框图将所有干扰解决为作用于阀门输入电流的单个干扰电流
考虑要停止汽缸:它处于位置稳定状态,并且存在作用在活塞上的必要的力平衡。这要求速度为零。在图2中,这意味着位置积分器的输入必须精确为零。同样,阀门输出流量也必须为零,因此进入阀门的有效电流I EFF为零。
总结阀流量增益模块输入G Q的稳态条件的公式反映了有效阀门电流,由下式给出:
I EFF = I D + C A - AH X.
但对于位置稳定状态,阀门的有效输入电流为零,因此:
X SS =(I D + C A)/ AH
分成两个术语后:
X SS = I D / AH + C / H.
该等式很有意思,因为它表明在零干扰电流的条件下,输出位置X SS简单地是指令信号C除以换能器增益H,即期望的结果。但它也描述了干扰电流的影响,并清楚地表明它的影响与幅度AH成反比地减小。因此,即使干扰是不可避免的,如果环路增益足够高,它们的效果也可以保持在界限内。
实际上,这是使用比例控制的不饱和聚酯树脂热压成型液压机系统的设计策略。也就是说,知道预期的负载,压力和温度变化,我们可以将允许的定位误差与预期的干扰电流相匹配,并确定所需的增益和闭环带宽。
减少干扰的影响
现在让我们将注意力转移到减少对控制系统起作用的干扰的影响。可以测量这些干扰的影响。因此,至少在原则上,它们可以得到纠正; 而且,在实践中,它们是可纠正的 - 在限度内。
图3的系统与图1中出现的系统相同。然而,增加了一个装有误差校正电位计和电压表的人类观察员。当气缸上没有负载时,系统为空。因此,误差读数电压表会指示为零。这可以在真实系统中通过调节伺服阀上的零位控制同时观察电压表并继续调节直到电压表读数为零来完成。
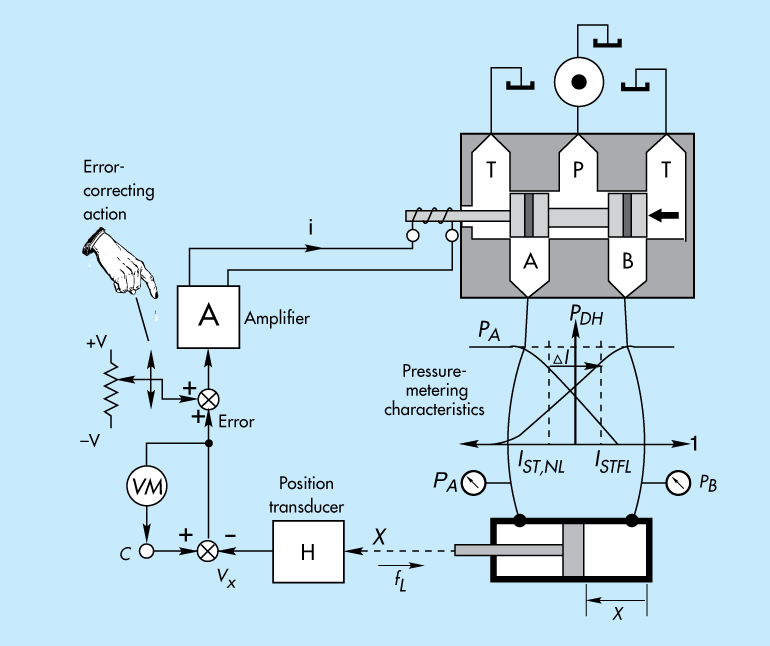
3.读取电压表上的误差电压的人类观察者可以消除由任何干扰引起的稳态定位误差
现在考虑负载的大小增加。由于已经解释的原因,气缸将移动到新位置,导致负载引起的定位误差。但是,更重要的是,电压表上会出现可读电压。该值除以换能器增益,是位置误差的量。
如果人类观察者在观察电压表的同时转动纠错电位器并继续调整直到其读数为零,则汽缸必须返回其原始的卸载位置。负载引起的错误已得到纠正!如果这是在每个停止点完成的 - 并且如果存在足够的时间 - 可以补偿所有干扰。
这是积分控制的本质,但是这个例子使用了影响控制的人工操作员。人类擅长这样的事情。
当然,将人放在每个伺服环中都是不切实际的。因此,干扰问题的解决方案是用硬件实现积分控制。这可以通过现代电子设备轻松完成; 这个概念如图4所示。
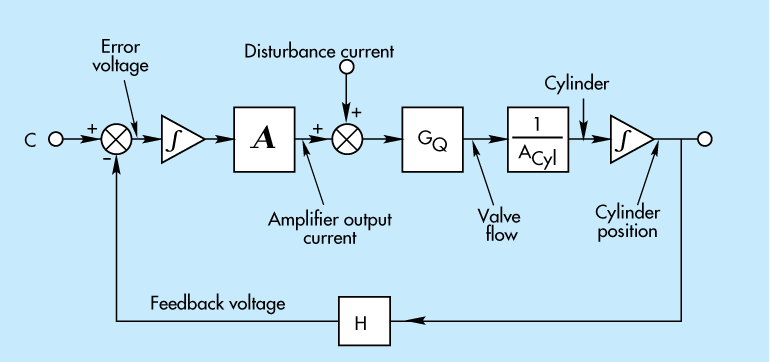
4.在图2的方框图的基础上,通过在伺服放大器的误差电压的下游添加积分器来实现积分控制
介绍集成
模拟集成通过运算放大器和数字控制器中的软件完成。积分器的一个特性是,只有当输入完全等于零时,其输出才会保持其最后一个值。这意味着输出增加或减少 - 取决于输入的代数符号 - 输入不为零的任何时间。如果我们将这个原理应用于手头的电路,我们可以很容易地看到积分器如何执行消除干扰误差所需的功能,从而消除了跟随误差。
参考图4,假设命令轮廓C位于停留水平,并且圆柱体不移动。这意味着速度必须为零。换句话说,气缸积分器的输入必须绝对为零。现在假设某种阀零扰动导致误差电压变为非零。也就是说,命令和反馈信号变得不相等。如图所示,控制器积分器就位,非零输入必须改变积分器的输出。增加的输出被放大并送到阀门,阀门改变其开口,使气缸移动。
现在的问题是,“它将移动多长时间?”答案在于控制器集成商的输入。在速度和控制器放大器的输入变为零之前,系统不会停止。两个积分器必须具有绝对零输入才能使系统处于平衡状态(零)。
但请注意,两个积分器的输出必须为零。实际上,控制器积分器的输出是将阀芯保持在其受干扰位置以使气缸经受力平衡的输出。在此过程中,控制器积分器累积了干扰,其输出提供了补偿干扰所需的偏移。这就是积分控制的“魔力”。
检查非零条件
现在考虑当轮廓处于恒定速度(恒定斜率或斜坡输入)区域时的轮廓输入命令的情况。我们已经看到,按不饱和聚酯树脂热压成型液压机比例控制的位置伺服需要命令和反馈之间的误差,以保持阀门打开到足以产生指令速度。但是看一下使用整体伺服控制系统会发生什么。如果假定气缸以指令速度运动,则气缸积分器的输入是与气缸速度相关的非零值。阀门流量也不为零,阀门开启量相当大。因此,阀门电流不能为非零。如果暂时忽略干扰电流的可能性,则伺服放大器的输入同样为非零。
接下来考虑命令和反馈信号不相等。这导致非零误差 - 控制器积分器的非零输入。在这种情况下,控制器积分器的输出必须改变。实际上,如果反馈电压滞后于指令电压,则控制器积分器输出必须增加。这将增加阀门开度并导致气缸速度增加。因此,由于存在一些加速度,我们看到我们先前对恒定输出速度的假设与非零误差电压相冲突。
我们提出的下一个问题是,“加速会持续多长时间?”答案还在于检查控制器积分器的输入和输出。只要存在非零输入信号,积分器输出将继续增加。因此,仅当控制器积分器输入为零时,系统才处于稳态速度状态,进一步要求命令和反馈电压必须完全相等。换句话说,以下错误已得到完美补偿!这是令人愉快的事态,因为我们不仅补偿了干扰的影响,而且还消除了跟随误差。
在精心设计的不饱和聚酯树脂热压成型液压机整体控制伺服机构中,最终输出精度可以接近传感器的精度。这是因为servoloop现在对错误没有任何贡献。有些人可能声称只有传感器限制了最终的准确性。这一立场似乎是一个过于乐观的结论,至少需要解释。
整体控制作为现实
似乎自动控制中没有一个听起来不错的概念没有相当大的成本。积分控制肯定是这种情况。虽然很容易看出如何校正稳态误差,但积分控制严重影响伺服环路稳定性并不是那么明显。实际上,将简单的积分控制结合到位置伺服机构中会导致伺服环路的不稳定性。
通过考虑图4的环路中的相移可以看出对此的证明。不稳定的条件要求有180度。在环路增益至少为1的相同频率处的相移。在比例控制伺服系统中,气缸积分器产生90度。在所有频率下相位滞后,阀门和负载产生另一个90度。某些非零频率的相位滞后。因此,在比例控制的位置伺服中总是存在不稳定的可能性。但是,设计人员必须调整增益以确保稳定性。
在图4所示的整体控制的位置伺服中,两个积分器没有围绕它们的反馈。也就是说,他们是纯粹的集成商。每个产生90度。所有频率的相位滞后 因此,180度。系统设计人员可用的总保证金由两个集成商消耗。没有余量,所以系统绝对不会在所有增益上不稳定。
仅通过包括其他分量即比例和微分项,可以在不饱和聚酯树脂热压成型液压机整体控制的位置伺服中实现稳定性。这是首字母缩略词PID来自:比例 - 积分 - 微分控制。PID控制的经典配置如图5所示。请注意,导数和比例分量在程序框图中并行显示。
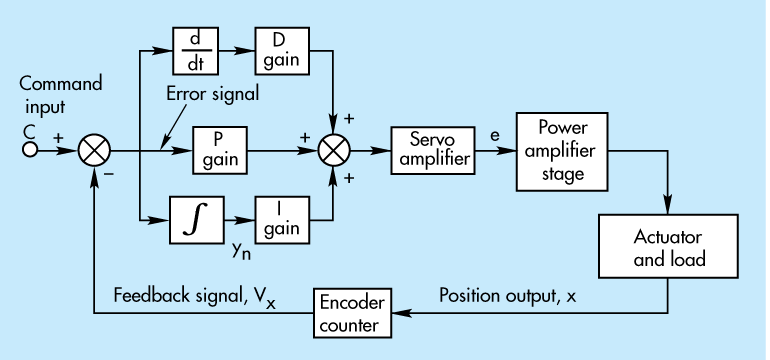
5.该方框图表示了比例 - 积分 - 微分(PID)控制器的经典实现
PID组件的存在不会降低积分控制的目标,即将稳态误差降低到零。这可以通过假设系统稳定并处于稳定状态来理解,这不是简单地将组件放在一起的自动结果。因此,输出致动器停止,控制阀处于零位,并且进入阀门的电流恒定且接近零。这要求PID夏天的输出是恒定的。如果夏天的输出是恒定的,输入到PID积分必须绝对为零,即使P和d实现。但正如我们已经了解到的那样,积分器的输入是系统错误。因此,系统错误必须为零,这是所需的结果。
PID调整的目标
自从PID于1930年首次发明以来,人们一直试图调整控制器。最近,已开发出可自动调整自身的控制器。自动调整算法对受控机器进行了一些假设。结果,不存在真正的通用调整过程。我的目标不是提供一个,而是提出一些目标。这些目标是必需的,因为如果您已调整PID以提供最佳响应,则需要知道该条件是什么。
提供最佳性能的PID控制回路的一个标准是应该调整伺服回路以获得最小的闭环建立时间。在运动控制应用中,命令配置文件中的任何恒速平台(包括零速度下的任何驻留平台)必须持续超过伺服环路建立时间。否则,伺服回路将不会达到稳定状态,并且错误不会变为零。
假设“困难系统” - 即流体力学共振频率远低于阀门带宽的系统。这些是最具挑战性的系统。在这样的不饱和聚酯树脂热压成型液压机系统中,伺服环路建立时间由下式给出:
Ť 分钟,P = 7.5 /(Z Ť ' Ž瓦特Ñ),
其中T min,p是通过简单比例控制达到稳态的最小时间,
z T是由阀门平台或通过执行器的机械摩擦和内部泄漏引起的总阻尼
w n是以弧度/秒为单位的流体力学共振频率。(不是Hz)。
实施积分控制后,建立时间增加:
Ť 分钟,我 = 10 /(Z Ť ' Ž瓦特Ñ),
其中T min,i是可能的最小稳定时间。
使用这些方程的两种最佳方法是首先实现比例控制并使用步进输入测试系统。其次,调整增益直到达到最小稳定时间。注意时间,然后实现积分控制。但现在您知道绝对最小建立时间将比仅比例建立时间大约三分之一。继续调整,直到你尽可能接近两次。如果积分控制有效,您还将建立最低速度平台时间。






